Verification and validation of complex automated driving functions is a difficult task. Especially showing that they work properly in all possible situations and under all conditions, poses new challenges for automotive application development.
TNO has developed a methodology to tackle these challenges. One of their projects in the area of ADAS (advanced driver assistance systems) is 'StreetWise'.
Real-life data from drivers and test facilities can be used to derive scenarios about driver behavior, such as overtaking or approaching a crosswalk. These scenarios can be turned into test cases that car manufacturers or OEM’s can use to simulate how their automated driving software will react to a certain scenario.
The benefits: correct scenarios and test cases can hugely reduce real-world testing costs.
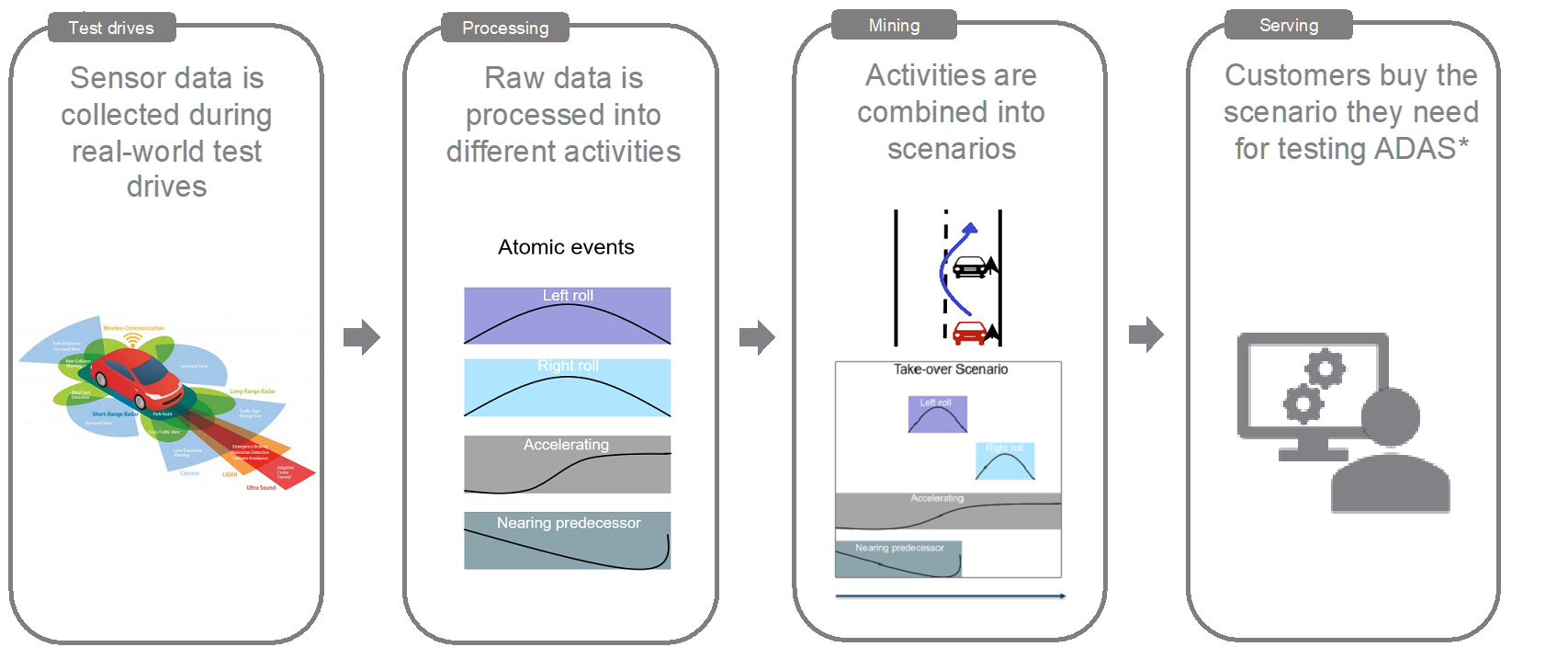
The StreetWise project collects all this sensor data from cars driving in the real world. Data is processed in the Itility Data Factory; by cutting up each drive into a number of activities (for example brake, accelerate). The activities are then combined together in various scenario’s (for example overtaking a car on a 70KM road in the Netherlands on a rainy day).
An API allows partners and customers to search for specific scenario’s in the large TNO StreetWise database, and receive a large set of simulation data for all sensor statuses for their requested scenario. To test out their autonomous software, without needing to drive for 100.000’s of kilometers on the road.
In order to define the activities, all data (for example from the speed and velocity sensor) is first stripped from noise, using Local Polynomial Regression. Then an algorithmic function scans the smoothed data for local minimum, maximum, or slopes, in order to mark events. Data is separated at each event marker and stored as individual shapelets (= activities). A neural network is trained by ‘showing’ it a large number of shapelets, manually tagged by domain experts of TNO. The trained model is then ready to be used for automatically tagging large quantities of new shapelets.
Biggest challenge in this project is the manual activity that is needed from (scarce) domain experts to add meta data to the drives, and to tag the various shapelets.